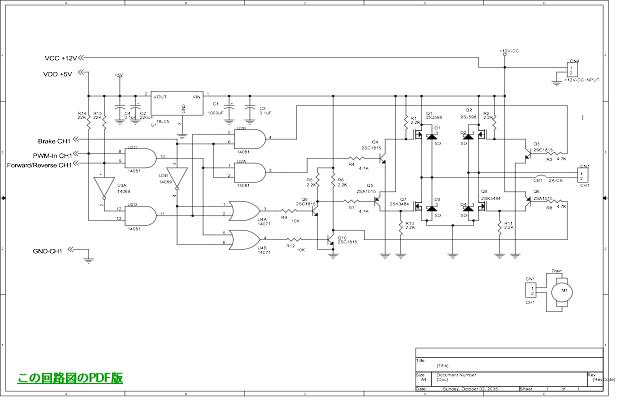
マイコンのプログラムにより、出力ポートで直接、Hブリッジを制御して、正転/逆転、ブレーキ動作を実現することも可能ですが(コストを考えれば当然そうなります)、ここでは、メタルゲートCMOSを使用して、ハードウェアで、3つの入力端子でのマイコンからのロジックレベルにより正転/逆転、ブレーキ動作を行っています。ここでロジック回路にメタルゲートCMOSを使用したのは3.3V→5Vへのレベル変換も兼ねています。
PWM-In端子にマイコンのタイマ端子からのPWM信号が入力されます。
Brake端子にマイコンの出力ポートが接続され、Highレベルで走行、Lowレベルでブレーキ状態です。
Forward/Reverse端子にもマイコンの出力ポートが接続され、Highで正転(順方向)、Lowで逆転(逆方向)になります。ブレーキはこのユニットのBrake端子をLowにしてしまう、完全なブレーキ状態(PWM信号は出ない)とPWM出力がモーターの回転条件達していない、デューティの時(アイドリング状態)の2種類があります。列車の滑走ブレーキ状態の時はこのBrake端子はHighです。PWM信号のソフトウェアによる制御のみで行っています。滑走ブレーキ状態とは列車が緊急ブレーキをかけた時、直ぐには止まらず、惰性である程度の距離を滑走して止まる状態です。Nゲージ模型ですと、モーターの駆動電圧がゼロになると瞬間に停止状態になり面白くありませんので、このモードをソフトウェアで行っています。但し、模型が搭載している、モーターのスペックや連結数や模型の走行状態によって条件が千差万別なのでこの、モードで常に滑走してから止まると言うわけではありません。最近のフライホィール付きモーターを搭載した模型では必要ないかも知れません。駅への停車でスロットルを使わず、ブレーキスィッチのみで所定の位置に停止するゲーム感覚が楽しめます。
上の基板にはこの回路が3チャンネル分 実装されています。又、出力には3Aのポリスィッチを入れて、レール上での短絡、過電流から出力回路を保護しています。ポリスィッチ は定格近い過電流が流れると、素子の温度が上昇して、内部抵抗が大きく上昇して電流を低減させます。温度が下がると内部抵抗は自動的に小さくなり、元に復帰します、一種の自動復帰型のヒューズです。 |